- 0단계부터 5단계 까지 구분되어 있음
- 4단계, 시스템 오류를 제외한 운전자와의 상호작용이 불필요
- 3단계 이후부터 주변 환경 정보에 따른 차량의 자동 가감속
- 5단계, 자율주행 단계
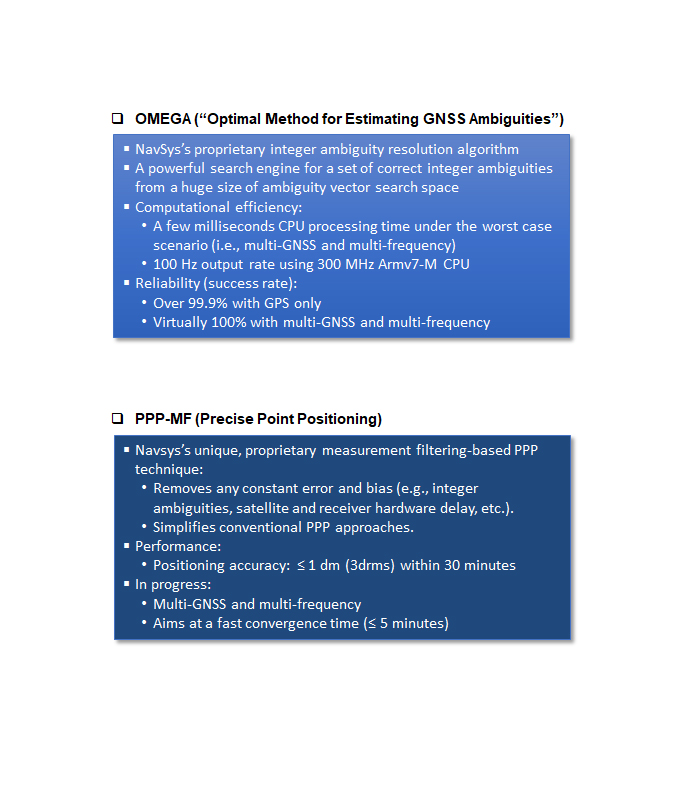
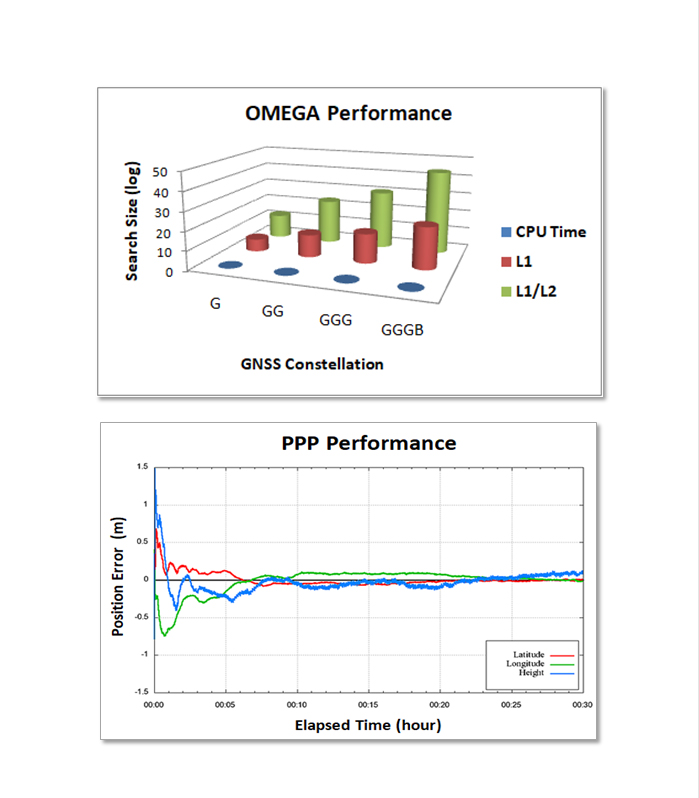
*자율주행을 위한 고정밀 위치 정보를 위해서는 GNSS 필터링 기술인 PPP, RTK & OMEGA 기술이 필요
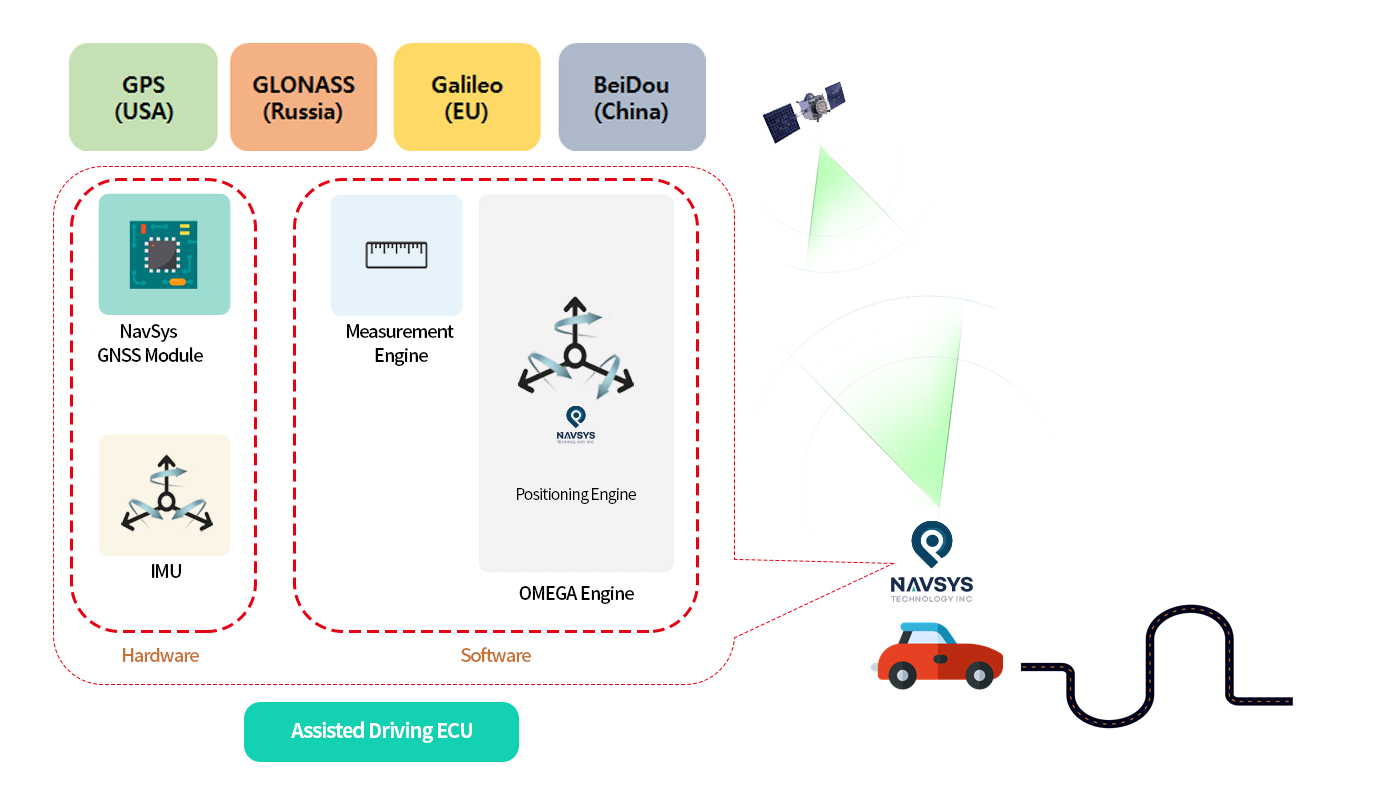
*자율주행을 위한 고정밀 위치 정보를 위해서는 GNSS 필터링 기술인 PPP, RTK & OMEGA 기술이 필요
 컨테이너 야적장 항공뷰
컨테이너 야적장 항공뷰
 현장에 설치된 자율주행 시스템
현장에 설치된 자율주행 시스템
2010-2011년 기차선로 주위에서 cm정밀성을 요구하는 화물기차의 컨테이너 하역작업용 크레인의 자율주행이 가능하도록 해주는 프로젝트
GPS 기준국, 이동국을 각각 1개 설정하고 1개의 자율주행 시스템을 구성하여 “Steer” 소프트웨어의 “Map and Match” 를 활용한 크레인의 자율주행
 Lawn Mover 시험 환경
Lawn Mover 시험 환경
 자율주행 시스템이 장착된 Lawn Mover
자율주행 시스템이 장착된 Lawn Mover
2007-2008년 고르지 못하며 미끄러지는 지형적 문제 또는 기계적 결합으로 인한 설정된 코스에서 벗어나는 Lawn Mover의 경로를 잡아주는 프로젝트
GPS RTK navigation과 위치 정보를 활용하여 Lawn Mover의 초기 모델 개발을 지원
GPS 기준국, 이동국을 각각1개 설정하고 1개의 자율주행 시스템을 구성하여 Lawn Mover를 자율주행 가능하도록 함
 자율주행 화물차
자율주행 화물차
 자율주행 시스템이 장착된 화물차
자율주행 시스템이 장착된 화물차
2006년 cm정밀성을 요구하는 컨테이너 이송 화물차의 자율주행이 가능하도록 해주는 프로젝트
차량의 자율주행 신뢰성을 향상을 위해 GPS RTK와 INS 시스템을 결합 하여 프로젝트를 진행
1개의 GPS 기준국과 2개의 이동국을 설정하여 자율주행 시스템을 구성하여 화물 차량의 자율주행 가능하도록 함
![]()
㈜네브시스 주소 : 서울시 금천구 디지털로9길, 33 (가산동) IT미래타워 2003호 내 1호
2003-1. 3 Digital-ro 9-gil Geumchen-gu, Seoul, Korea
ALL RIGHTS RESERVED NavSys Technology Inc.
대표전화 : 02-554-1340
E-Mail : navsys@navsys-tech.com